Operations:
Completed the mini grant flyer. We sent it to some teams and posted in on FIRST Long Island to get teams. We worked on the Team Expenses and Past Sponsors part of the sponsor intro package and began brainstorming ideas for sponsor benefits.
Podcast:
Found teams throughout the United States in every single state in order to record our 50 State Series on our Regal Eagle Podcast.
General:
To be able to familiarize the new members to the lab we had them organize gears, belts, sockets, and hex drivers. This will teach them where we keep all our parts and pieces if they need to find any of these parts in their robotics career.
Mechanical:
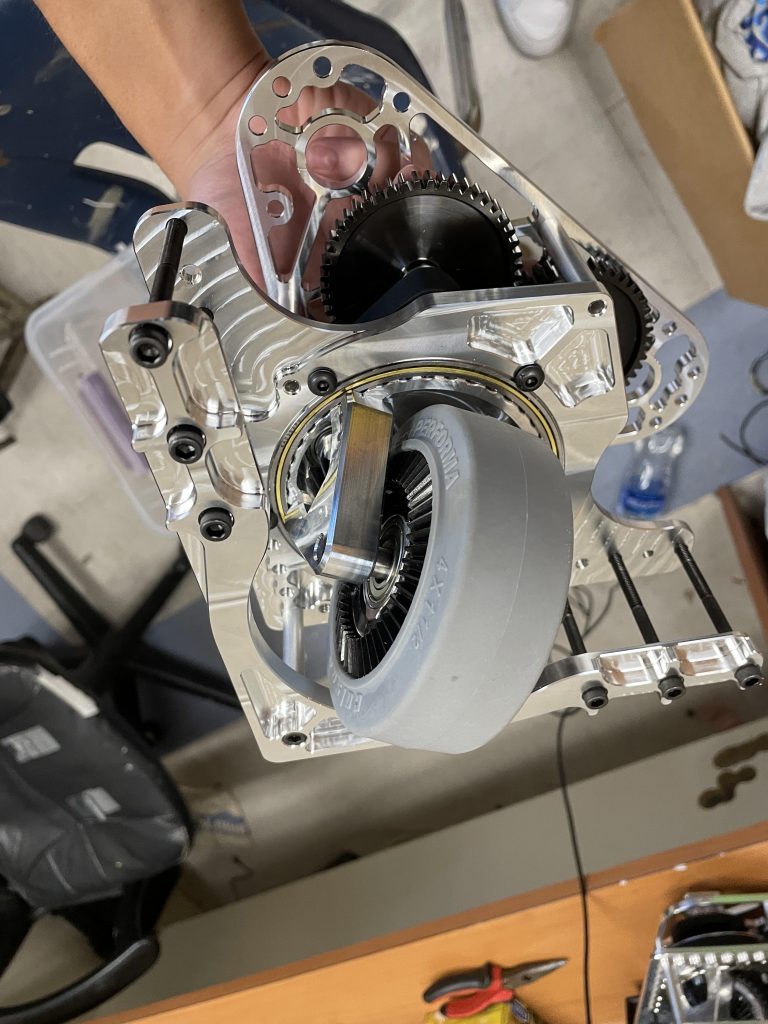
Completed a swerve drive module with the Colson wheel on Swever Drive Specialities.
Programming:
Fixed the Position Constraints and Arm Movement. Found out that if the angle is close to the base angle then the arm is going to be a base angle in which it will turn off to prevent collisions. Finished the position constraints in Constants.java and delays on RobotContainer.java. We started the r path Path Planner. We enabled autonomous command at the beginning of auto.= in robot.java and Added new pathplanner command to robotcontainer.java. Code was polished up and is ready for driver practice. Autonomous worked, but we need a bigger space to run it fully