
The electrical team is learning to use a limit switch to put on the robot that senses and says when a component is touching or not and it prevents mechanisms from maneuvering too far in one direction or the other. We are also making adjustments to our bumpers so it will fit on the robot better. We have both of the climbers mounted on our robot to make our robot climber at Hofstra. We are rearranging our cables on our robot so that none of them get in the way of the movement system like what happened in one game at Regal Eagle Rampage. We are attaching the sparks that control the motor and are swapping the victor for a talon (for the flashlight for ball tracking). We are also wiring the spark max for the second climber.

Climbers 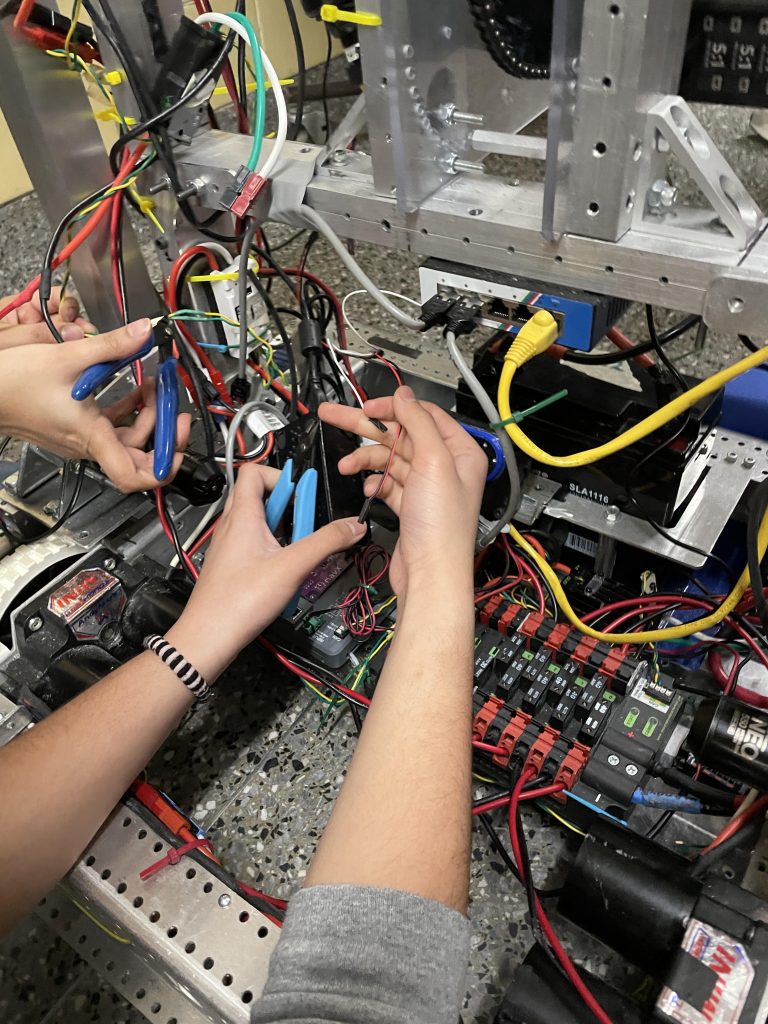
Reorganizing cables
Our robot can now climb and hang on the hangars!
We are just adjusting the flashlight on the robot and preparing for Hofstra! We also have an AR App! The AR App allows you to see a virtual image of the hub. This allows you to not have to build your own hub and you can see how far and if your robot would make the shot. This app is efficient and it allows other teams to not have to spend and waste the resources to make their own hub when they could have a virtual one. This app is very easy and fun to use.
These last weeks have been very fun and we are super excited to go to Hofstra! We have come a long way and we hope all of our work pays off!