Throughout the night, team members scoured Chief Delphi, looking at Ri3D teams and other sources to find anything that was useful. A few people found @howlongismyname’s Robot (CAD) in 12 Hours thread and loved the architecture. After a short meeting Sunday morning, team members started making a robot based on the architecture portrayed in that thread.
What is This Design?
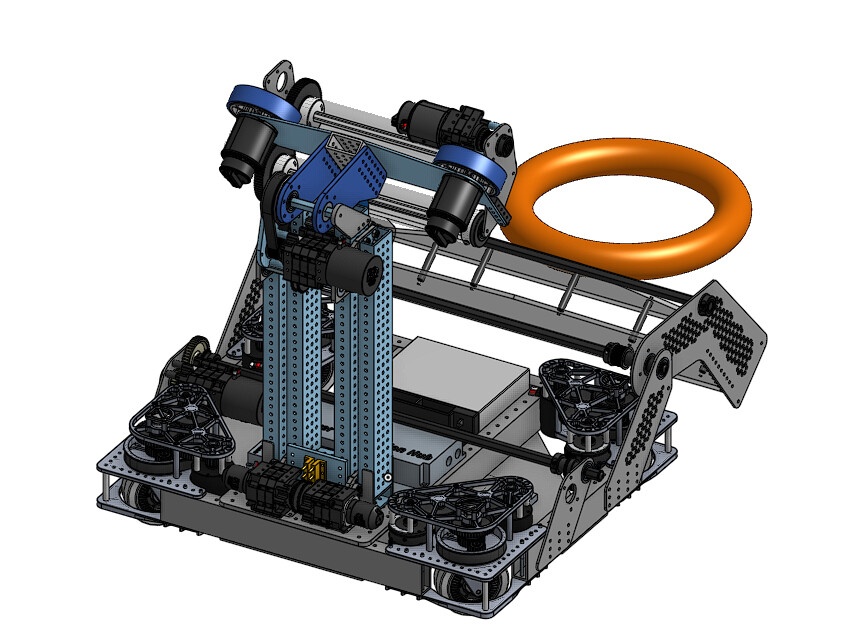
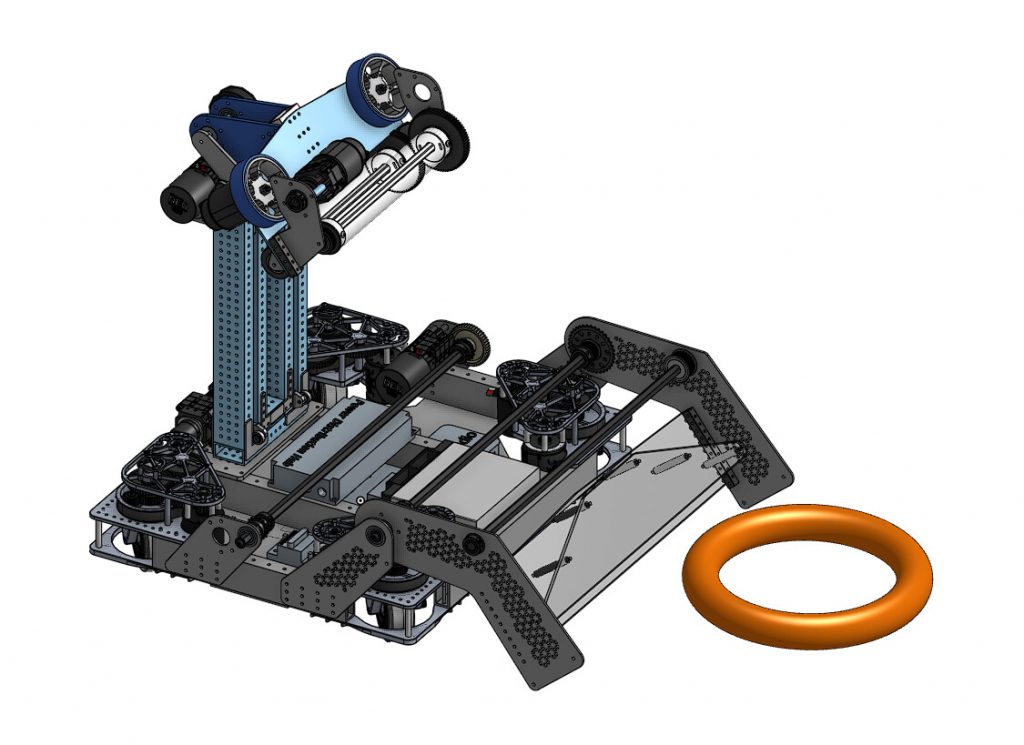
This design features a pivoting shooter on top of an elevator, with a separate ground intake.
The pivot allows for scoring downwards into the amp and up into the speaker.
The elevator is also mounted with hooks for climbing at the end of the match.
The intake features rollers to allow for quick ground pickup, found on many Ri3D teams.
The shooter features two 4” wheels directly driven by falcons. They provide 5” of compression on the Note, (Cranberry Alarm Ri3D)
To fit all our electronics in, we have a stacked design, where the PDH is on top of the RoboRio. This might change, but it would allow us to have more space on our bellypan for mounting other electronics including sparks.
Why This Design?
We want a design that is within our skill set, ruling out all pneumatics and any pink arms or turrets. We also wanted to accomplish the goals in our Need/Want/Don’t Want list above. This design seemed to accomplish both of these goals.
Our goal is to make this design quickly to find the flaws and figure out the best ways to solve them. Through the hard work of a few members, we created a similar robot as David did in the original post. There are some notable differences.
Firstly, our robot is 21” by 25”. We wanted it to be small and lightweight.
Next, we chose to use a thrifty elevator as it is what we constructed in the off-season.
Finally, we edited many of the motors and the locations of certain elements to allow for them to be within the rules (specifically frame perimeter) and to allow for what motors we expect to have.
Other Comments,
Right now the cad doesn’t have rollers for the intake, as we are still deciding how to go about it. The electronics currently mapped is a rough plan to ensure our bellypan has enough space and will probably be moved before the final version.
Another issue is that due to the low amount of space, we have to consider how the shooter will get the piece from the intake. Currently, it looks like the intake will eject the piece into the shooter and it will use the elevator to raise the piece out of the intake to score in the amp. It should be able to stay within the intake to score in the speaker, but that needs to be simulated.
We are also experimenting with lightening certain parts to get weight savings. We are aiming to be under 100 pounds with battery and bumpers (maybe even lower)
Photos: